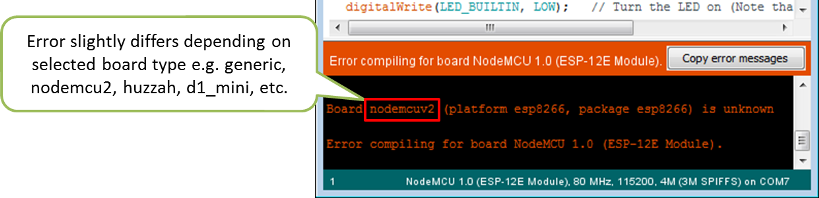
Facing this issue will not be able to compile any sketch for any ESP8266 module type
Statistics: Posted by davidbates — Mon Apr 27, 2020 9:51 am
]]>
Statistics: Posted by LEDEDIT PRO — Thu May 18, 2023 3:15 pm
Statistics: Posted by rpiloverbd — Tue Feb 15, 2022 8:27 am
Statistics: Posted by timg11 — Mon Feb 14, 2022 2:14 pm
//Copyright 2015 <>< Charles Lohr, see LICENSE file.
// Modified by TG for Wi-Fi Station mode at init 2022-02-11
#include "mem.h"
#include "c_types.h"
#include "user_interface.h"
#include "ets_sys.h"
#include "uart.h"
#include "osapi.h"
#include "espconn.h"
#include "commonservices.h"
#include <mdns.h>
#include <esp82xxutil.h>
#include <gpio.h>
#include <common.h>
#include <usb.h>
#define PORT 7777
#define procTaskPrio 0
#define procTaskQueueLen 1
static volatile os_timer_t some_timer;
//int ICACHE_FLASH_ATTR StartMDNS();
void user_rf_pre_init(void)
{
//nothing.
}
char * strcat( char * dest, char * src )
{
return strcat(dest, src );
}
//Tasks that happen all the time.
os_event_t procTaskQueue[procTaskQueueLen];
//Awkward example with use of control messages to get data to/from device.
uint8_t user_control[144]; //Enough for FW######## ### [128 bytes of data] [null]
int user_control_length_acc; //From host to us.
int user_control_length_ret; //From us to host.
void usb_handle_custom_control( int bmRequestType, int bRequest, int wLength, struct usb_internal_state_struct * ist )
{
struct usb_endpoint * e = ist->ce;
if( bmRequestType == 0x80 )
{
if( bRequest == 0xa7) //US TO HOST "in"
{
if( user_control_length_ret )
{
e->ptr_in = user_control;
e->size_in = user_control_length_ret;
if( wLength < e->size_in ) e->size_in = wLength;
user_control_length_ret = 0;
}
}
}
if( bmRequestType == 0x00 )
{
if( bRequest == 0xa6 && user_control_length_acc == 0 ) //HOST TO US "out"
{
e->ptr_out = user_control;
e->max_size_out = sizeof( user_control );
if( e->max_size_out > wLength ) e->max_size_out = wLength;
e->got_size_out = 0;
e->transfer_done_ptr = &user_control_length_acc;
}
}
}
uint8_t my_ep1[4];
uint8_t my_ep2[8];
extern uint32_t usb_ramtable[31];
extern int keybt;
extern int keymod;
extern int keypress;
static void ICACHE_FLASH_ATTR procTask(os_event_t *events)
{
struct usb_internal_state_struct * uis = &usb_internal_state;
struct usb_endpoint * e2 = &uis->eps[2];
e2->ptr_in = my_ep2;
e2->place_in = 0;
e2->size_in = sizeof( my_ep2 );
if( keypress && e2->send == 0 )
{
my_ep2[0] = keymod;
my_ep2[2] = keybt;
e2->send = 1;
keypress = 0;
}
CSTick( 0 );
if( user_control_length_acc )
{
//printf( "\nGot: %s\n", usb_internal_state.user_control );
int r = issue_command( user_control, sizeof( user_control )-1, user_control, user_control_length_acc );
user_control_length_acc = 0;
//printf( "%d/%s/%d\n", usb_internal_state.user_control_length_acc, usb_internal_state.user_control, r );
if( r >= 0 )
user_control_length_ret = r;
}
system_os_post(procTaskPrio, 0, 0 );
}
//Timer event.
static void ICACHE_FLASH_ATTR myTimer(void *arg)
{
#if 0
struct usb_internal_state_struct * uis = &usb_internal_state;
struct usb_endpoint * e1 = &uis->eps[1];
struct usb_endpoint * e2 = &uis->eps[2];
int i;
//Send mouse and keyboard commands
//my_ep1[0] ^= _BV(1); // _BV(x) ((1<<(x))
// my_ep1[1] = 1; //X offset
// my_ep1[2] = 1; //Y offset
//[0] == Button Bitmask ( _BV(0) == the Left button )
//[1] == The X offset
//[2] == The Y offset
//[3] == ?
// my_ep2[2] ^= 8; //Keyboard
printf( "%d\n", e1->send );
e1->ptr_in = my_ep1;
e1->place_in = 0;
e1->size_in = sizeof( my_ep1 );
e1->send = 1;
e2->ptr_in = my_ep2;
e2->place_in = 0;
e2->size_in = sizeof( my_ep2 );
e2->send = 1;
#endif
CSTick( 1 );
}
void ICACHE_FLASH_ATTR charrx( uint8_t c )
{
//Called from UART.
}
volatile uint32_t my_table[] = { 0, (uint32_t)&PIN_IN, (uint32_t)&PIN_OUT_SET, (uint32_t)&PIN_OUT_CLEAR, 0xffff0000, 0x0000ffff };
#ifdef PROFILE
int time_ccount(void)
{
unsigned r;
/* volatile unsigned a = 0xabcdef01;
asm volatile ("testp:");
a &= ~(1<<10);
*/
asm volatile ("\
\n\
\
intrs: \
call0 my_func\n\
j end\n\
\n\
end:\n\
\
\n\
sub %[out], a11, a9\n\
" : [out] "=r"(r) : : "a9", "a10", "a11" );
return r; //rsr a9, ccount //rsr a11, ccount
// addi %[out], %[out], -1\n\
}
#endif
void user_rf_cal_sector_set()
{
}
LOCAL os_timer_t test_timer;
/******************************************************************************
* FunctionName : user_esp_platform_check_ip
* Description : check whether get ip addr or not
* Parameters : none
* Returns : none
*******************************************************************************/
void ICACHE_FLASH_ATTR
user_esp_platform_check_ip(void)
{
struct ip_info ipconfig;
//disarm timer first
os_timer_disarm(&test_timer);
//get ip info of ESP8266 station
wifi_get_ip_info(STATION_IF, &ipconfig);
if (wifi_station_get_connect_status() == STATION_GOT_IP && ipconfig.ip.addr != 0) {
os_printf("got ip !!! \r\n");
} else {
if ((wifi_station_get_connect_status() == STATION_WRONG_PASSWORD ||
wifi_station_get_connect_status() == STATION_NO_AP_FOUND ||
wifi_station_get_connect_status() == STATION_CONNECT_FAIL)) {
os_printf("connect fail !!! \r\n");
} else {
//re-arm timer to check ip
os_timer_setfn(&test_timer, (os_timer_func_t *)user_esp_platform_check_ip, NULL);
os_timer_arm(&test_timer, 100, 0);
}
}
}
/******************************************************************************
* FunctionName : user_set_station_config
* Description : set the router info which ESP8266 station will connect to
* Parameters : none
* Returns : none
*******************************************************************************/
void ICACHE_FLASH_ATTR
user_set_station_config(void)
{
// Wifi configuration
char ssid[32] = "YOURSSID";
char password[64] = "YOURWPAPWD";
struct station_config stationConf;
os_memset(stationConf.ssid, 0, 32);
os_memset(stationConf.password, 0, 64);
//need not mac address
stationConf.bssid_set = 0;
//Set ap settings
os_memcpy(&stationConf.ssid, ssid, 32);
os_memcpy(&stationConf.password, password, 64);
wifi_station_set_config(&stationConf);
//set a timer to check whether got ip from router succeed or not.
os_timer_disarm(&test_timer);
os_timer_setfn(&test_timer, (os_timer_func_t *)user_esp_platform_check_ip, NULL);
os_timer_arm(&test_timer, 100, 0);
}
void ICACHE_FLASH_ATTR user_init(void)
{
uart_init(BIT_RATE_115200, BIT_RATE_115200);
uart0_sendStr("\r\n\033c" ); //Clear screen
uart0_sendStr("esp8266 test usb driver\r\n");
system_update_cpu_freq( 80 );
//#define PROFILE
#ifdef PROFILE
uint32_t k = 0x89abcdef;
uint8_t * g = (uint8_t*)&k;
system_update_cpu_freq(160);
my_table[0] = 5;
printf( "%02x %02x %02x %02x\n", g[0], g[1], g[2], g[3] );
uint32_t rr = time_ccount();
printf( ":::::%d / %02x / %d\n", rr, rr, my_table[0] );
system_restart();
while(1);
#endif
//Print reboot cause
struct rst_info * r = system_get_rst_info();
printf( "Reason: %p\n", r->reason );
printf( "Exec : %p\n", r->exccause );
printf( "epc1 : %p\n", r->epc1 );
printf( "epc2 : %p\n", r->epc2 );
printf( "epc3 : %p\n", r->epc3 );
printf( "excvaddr:%p\n", r->excvaddr );
printf( "depc: %p\n", r->depc );
//Uncomment this to force a system restore.
// system_restore();
CSSettingsLoad( 0 );
CSPreInit();
//Create additional socket, etc. here.
CSInit();
//Set GPIO16 for INput
WRITE_PERI_REG(PAD_XPD_DCDC_CONF,
(READ_PERI_REG(PAD_XPD_DCDC_CONF) & 0xffffffbc) | (uint32)0x1); // mux configuration for XPD_DCDC and rtc_gpio0 connection
WRITE_PERI_REG(RTC_GPIO_CONF,
(READ_PERI_REG(RTC_GPIO_CONF) & (uint32)0xfffffffe) | (uint32)0x0); //mux configuration for out enable
WRITE_PERI_REG(RTC_GPIO_ENABLE,
READ_PERI_REG(RTC_GPIO_ENABLE) & (uint32)0xfffffffe); //out disable
SetServiceName( "espusb" );
AddMDNSName( "esp82xx" );
AddMDNSName( "espusb" );
AddMDNSService( "_http._tcp", "An ESP8266 Webserver", 80 );
AddMDNSService( "_esp82xx._udp", "ESP8266 Backend", 7878 );
//Add a process
system_os_task(procTask, procTaskPrio, procTaskQueue, procTaskQueueLen);
//Timer example
os_timer_disarm(&some_timer);
os_timer_setfn(&some_timer, (os_timer_func_t *)myTimer, NULL);
os_timer_arm(&some_timer, SLOWTICK_MS, 1);
printf( "Boot Ok.\n" );
usb_init();
//Set softAP + station mode %%%%%%%%%%%%%%MOD%%%%%%%%%%%%%
wifi_set_opmode(STATIONAP_MODE);
// ESP8266 connect to router. %%%%%%%%%%%%%%MOD%%%%%%%%%%%%%
user_set_station_config();
wifi_set_sleep_type(LIGHT_SLEEP_T);
wifi_fpm_set_sleep_type(LIGHT_SLEEP_T);
system_os_post(procTaskPrio, 0, 0 );
}
//There is no code in this project that will cause reboots if interrupts are disabled.
void EnterCritical()
{
}
void ExitCritical()
{
}
Statistics: Posted by timg11 — Fri Feb 11, 2022 5:52 pm
Statistics: Posted by timg11 — Fri Feb 11, 2022 3:21 pm
Statistics: Posted by timg11 — Fri Feb 11, 2022 8:49 am
Statistics: Posted by davidbates — Mon Apr 27, 2020 9:51 am
Statistics: Posted by AKA — Thu Oct 24, 2019 10:05 am
Statistics: Posted by caish5 — Fri Mar 16, 2018 12:27 pm
Statistics: Posted by kaspi — Sat Mar 03, 2018 1:15 am
Statistics: Posted by Jackryan — Wed Apr 05, 2017 11:49 am
Statistics: Posted by shery — Fri Mar 31, 2017 7:08 am
Statistics: Posted by popcorn — Thu Jan 26, 2017 3:03 pm
Statistics: Posted by RichardS — Thu Dec 22, 2016 4:47 pm
Statistics: Posted by Supriya Dhoke — Tue Nov 22, 2016 6:42 am
Ok, it's a little bigger than I was initially hoping, at 2.5kB, but, it seems to work pretty solid. It's much better than when you have the wifis and everything else going.
https://github.com/cnlohr/espusb/tree/master/bootloader
Right now, it just accepts control messages of length of ~2090 bytes (2048 plus a little bit) back and forth. Check out the "main" function for more info about how it works. You also get to keep the bRequest, wIndex, and other details so you don't need to weigh down the code with a protocol ontop of the control requests. I've tried sending/receiving as quickly as I could and I seem to get around 30kB/sec down at the same time as 30kB/sec up, or 60kB/sec in one direction.
Detection that there is a computer seems to happen in .1 to .3 seconds, so that's good.
I am still trying to figure out a good way to merge the interfaces... Take a look at main and see if you want something a little different?
Statistics: Posted by cnlohr — Sat Oct 08, 2016 12:15 am
Statistics: Posted by NopItTwice — Wed Sep 28, 2016 4:58 am
Statistics: Posted by dnc40085 — Thu Sep 08, 2016 4:00 pm
Statistics: Posted by RichardS — Mon Sep 05, 2016 8:43 pm
Statistics: Posted by RichardS — Mon Sep 05, 2016 4:35 pm
Statistics: Posted by cnlohr — Sun Sep 04, 2016 8:25 pm
cnlohr wrote:
... When the ESP receives a pin-change interrupt, it is cycle-precise all the way down to 160MHz!...
Statistics: Posted by nlhommet — Sun Sep 04, 2016 7:23 am
Statistics: Posted by cnlohr — Sun Sep 04, 2016 1:01 am
Statistics: Posted by rudi — Fri Aug 26, 2016 1:29 pm