- Sat Sep 15, 2018 9:09 pm
#78250
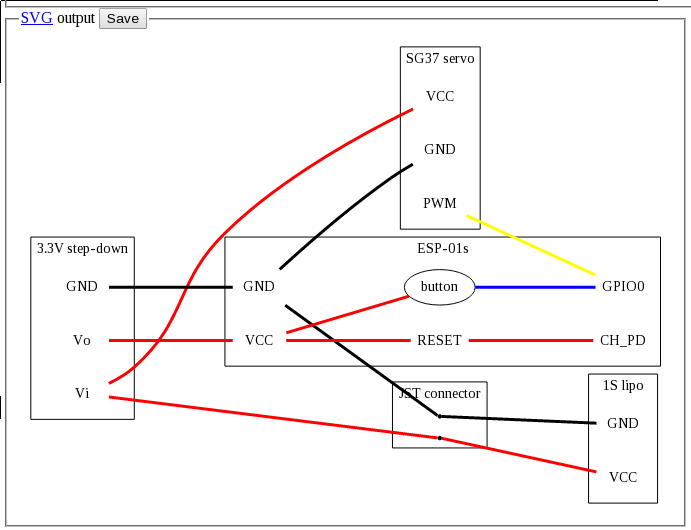
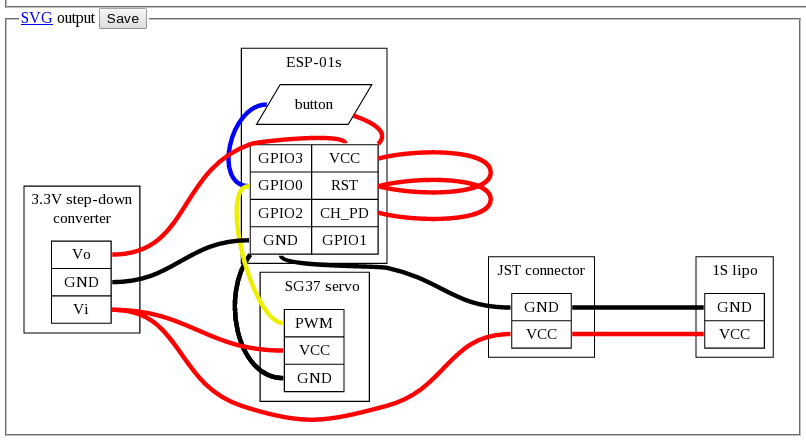
This is first video of work-in-progress lightweight servo bom drop mechanism. The ESP-01s running MicroPython, SG37 servo, 150mAh 25C lipo and 3.3V step-down converter as shown (14.6g sofar) will be attached to Eachine E52 drone (86.5g). The enabled WebREPL will be accessed from mobile Raspberry Pi ZeroW via webrepl_client.py providing remote Micropython shell on ground. "payload" module will have two functions, lock() and drop():
https://forum.micropython.org/viewtopic ... 180#p29865
I had to connect servo VCC to lipo VCC. While the 3.8V-4.2V from lipo are still outside of servo operating range 4.8V-6.0V, this setup works reliably. Because servo connector is connected to ESP-01s GND and GPIO-0 pins, GPIO-0 is low on power on. I had to solder small switch connecting GPIO-0 and VCC to avoid running ESP-01s into flash mode. For details see attached 8MP photo of the scene.
https://forum.micropython.org/viewtopic ... 180#p29865
I had to connect servo VCC to lipo VCC. While the 3.8V-4.2V from lipo are still outside of servo operating range 4.8V-6.0V, this setup works reliably. Because servo connector is connected to ESP-01s GND and GPIO-0 pins, GPIO-0 is low on power on. I had to solder small switch connecting GPIO-0 and VCC to avoid running ESP-01s into flash mode. For details see attached 8MP photo of the scene.
You do not have the required permissions to view the files attached to this post.
Last edited by HermannSW on Thu Oct 04, 2018 9:18 am, edited 4 times in total.