- Fri Oct 05, 2018 1:11 pm
#78498
I know it was risky to fly drone with everything mounted in our garden in near darkness.
But I wanted to know if drone plus servo payload drop mechanism plus drop payload really can fly.
The total weight was 98.8g, a little less than planned because I removed see-through plastic for back LED.
I had to fixate the drone camera, I superglued it as well in vertical position, needed for controlled drops.
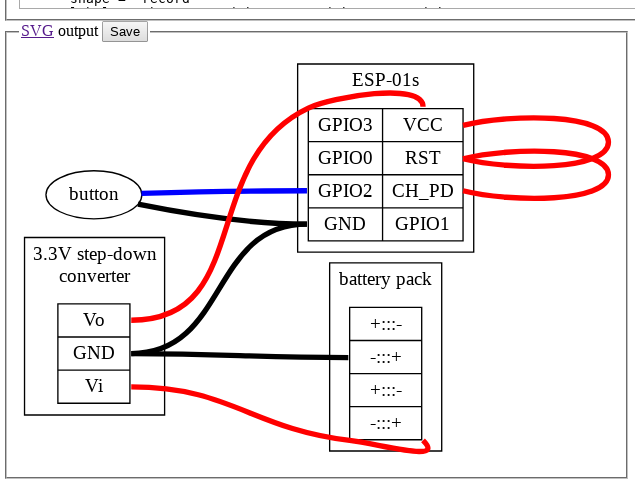
The ESP01s superglued to drone back will get a lot of fresh air from nearby back right drone blade.
Flights were successful, but I had to take over control during autostart take off phase (the drone normally lifts off until 1m above ground, and then remains there) in giving full power upward flight. I did two flights, both times drone lifted above our house roof top, perhaps 8m high. Difficult to keep drone under control in near darkness, bat was possible. The green front and red back LED could be seen nicely 8m down from ground, I never noticed them during daylight flights.
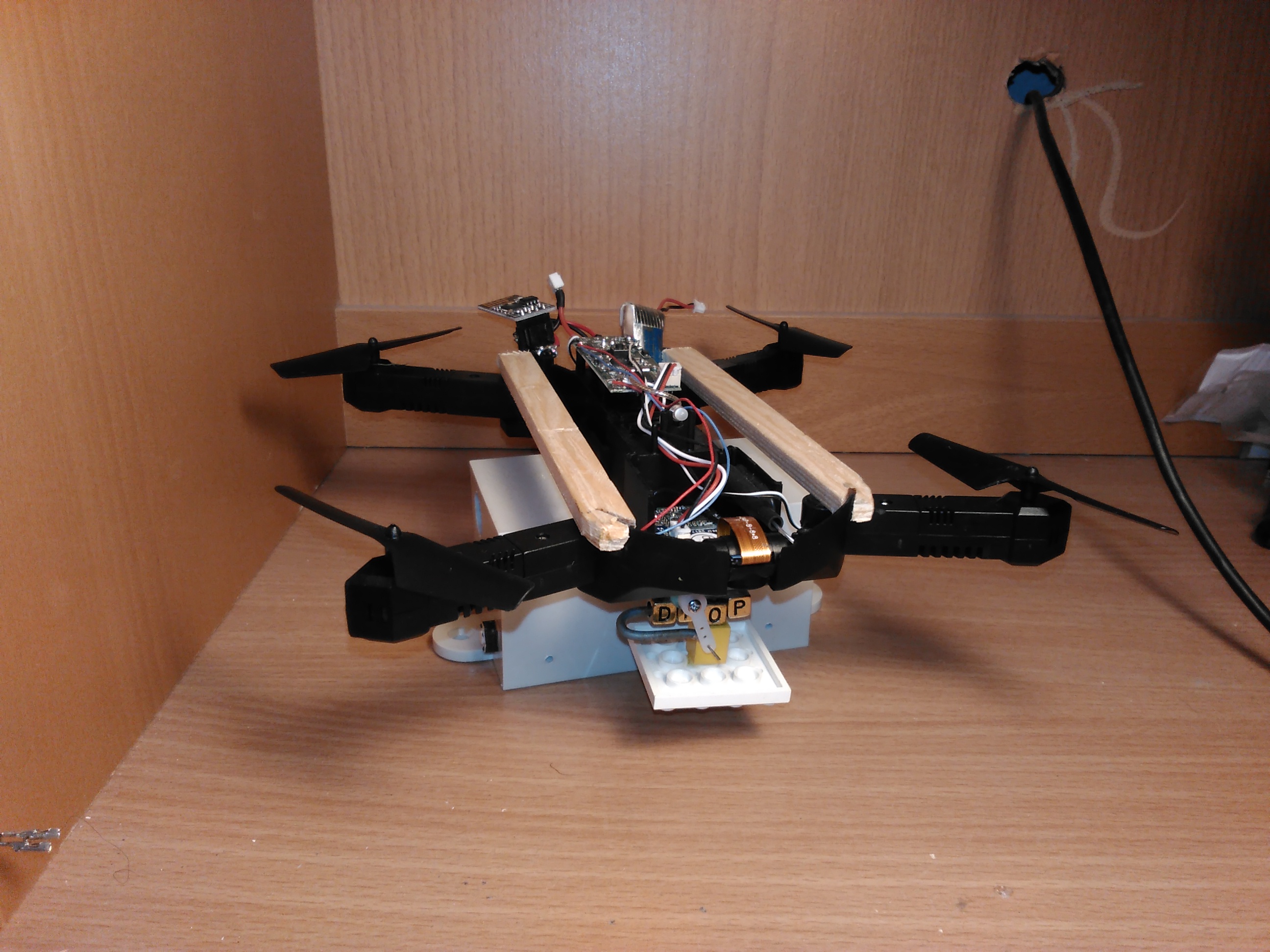
This is drone after the flights, lost a blade and the lipo that was loose in drone trunk on last landing, but found the lipo and still have >20 spare blades:
But I wanted to know if drone plus servo payload drop mechanism plus drop payload really can fly.
The total weight was 98.8g, a little less than planned because I removed see-through plastic for back LED.
I had to fixate the drone camera, I superglued it as well in vertical position, needed for controlled drops.
The ESP01s superglued to drone back will get a lot of fresh air from nearby back right drone blade.
Flights were successful, but I had to take over control during autostart take off phase (the drone normally lifts off until 1m above ground, and then remains there) in giving full power upward flight. I did two flights, both times drone lifted above our house roof top, perhaps 8m high. Difficult to keep drone under control in near darkness, bat was possible. The green front and red back LED could be seen nicely 8m down from ground, I never noticed them during daylight flights.
This is drone after the flights, lost a blade and the lipo that was loose in drone trunk on last landing, but found the lipo and still have >20 spare blades: