- Wed Oct 10, 2018 3:23 pm
#78562
Yesterday all seemed to be fine, everything mounted to drone and transmitter, MicroPython software side OK. I wanted to test drone flights with payload drops. Unfortunately the servo motor superglued to drone did only make noise, but did not move. That was frustrating.
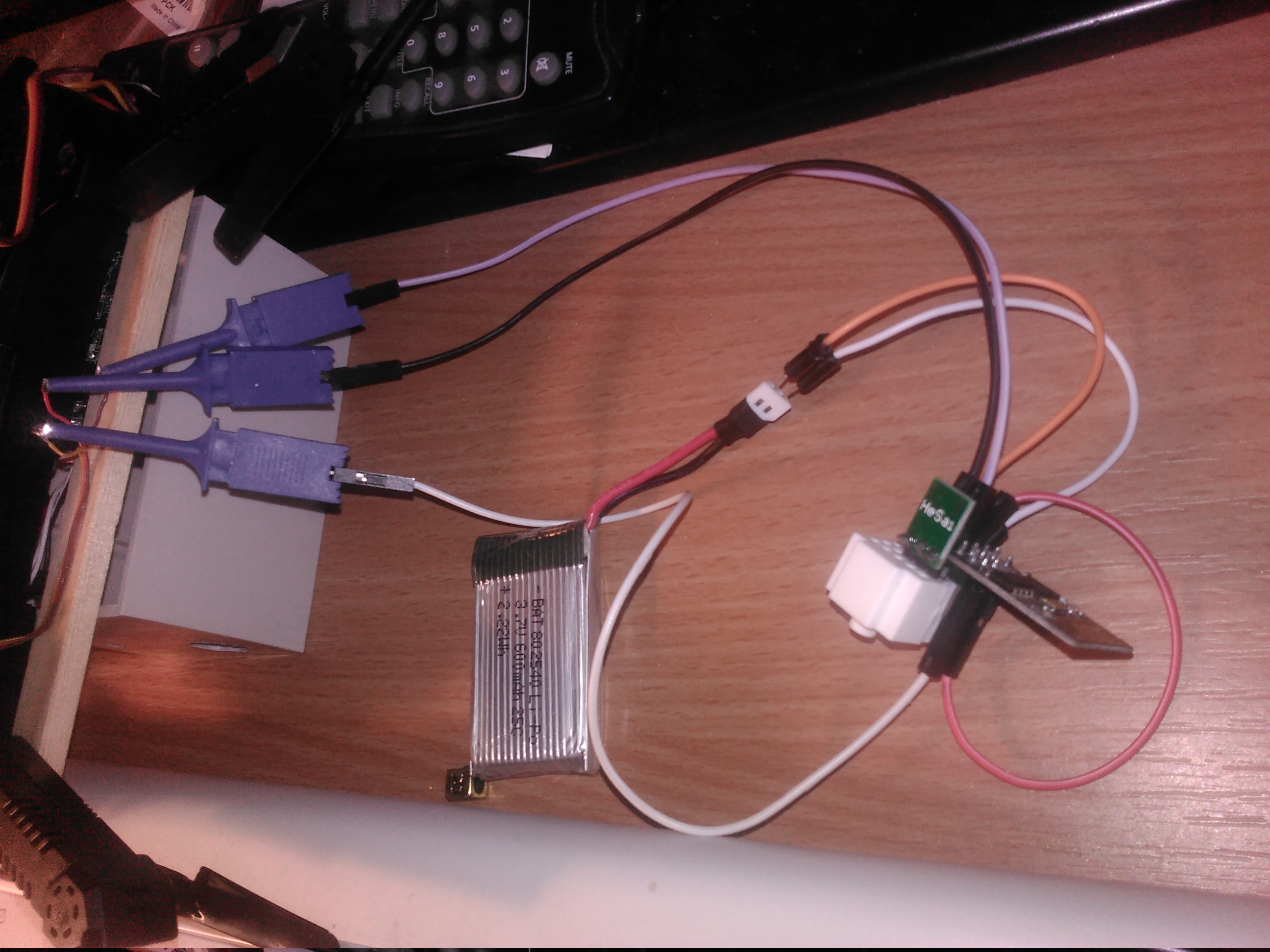
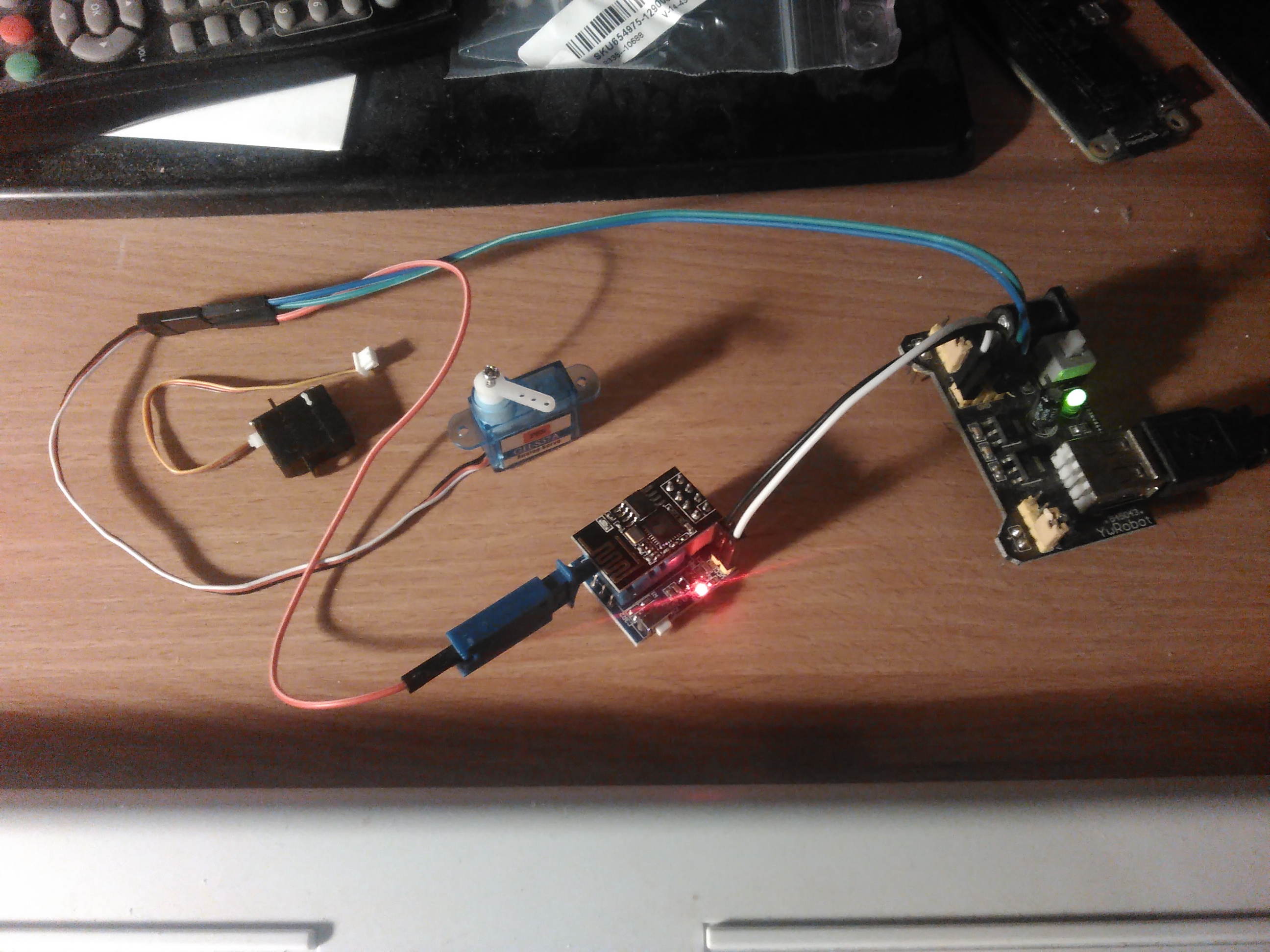
Today I first tested the spare SG37 3.7g servo motor I have, 3.3V and 5V voltages from MB102 power supply module, another ESP01s plugged into ESP01 DHT11 module for using its 2x4 connector. The new servo worked as expected:
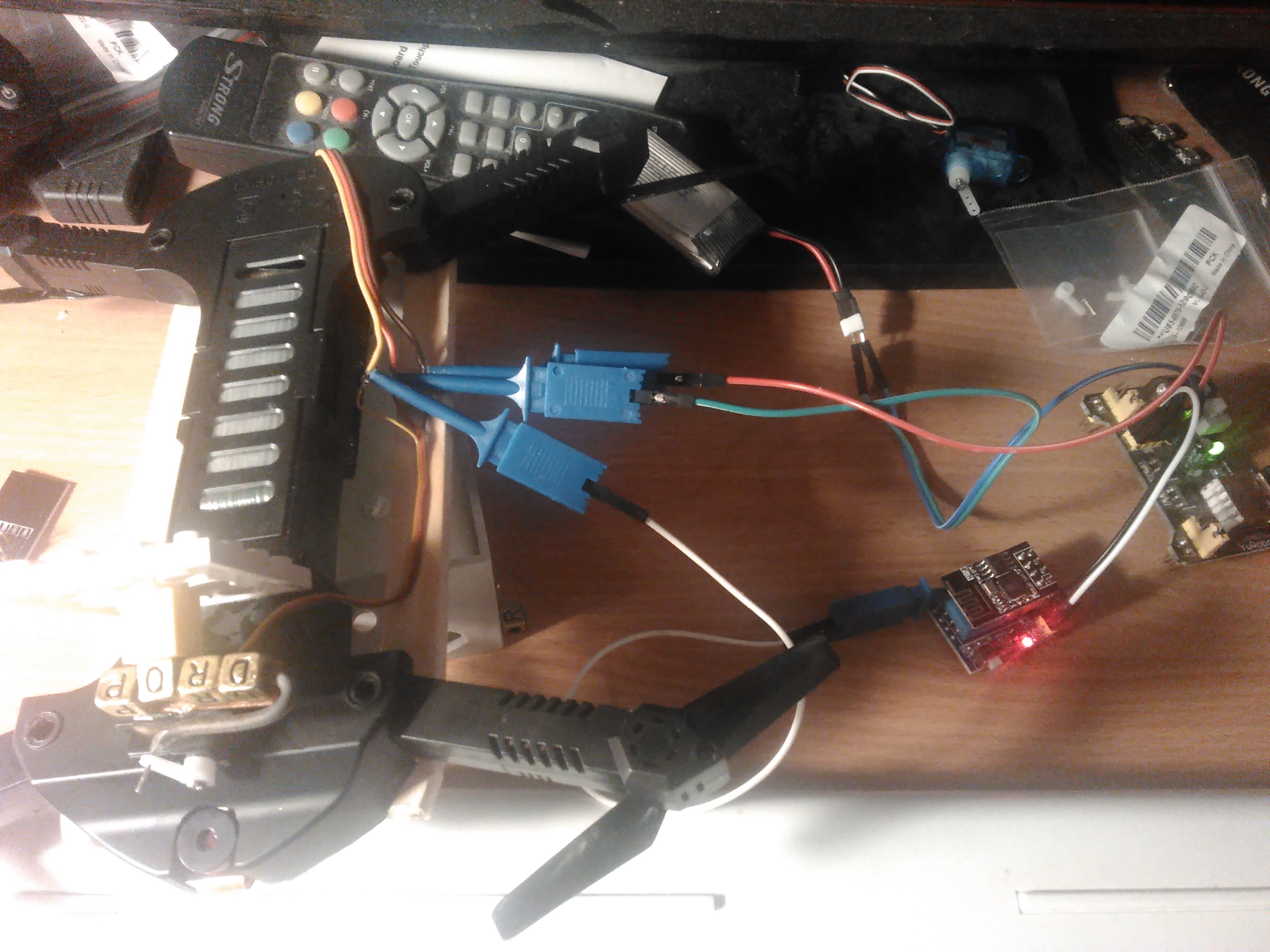
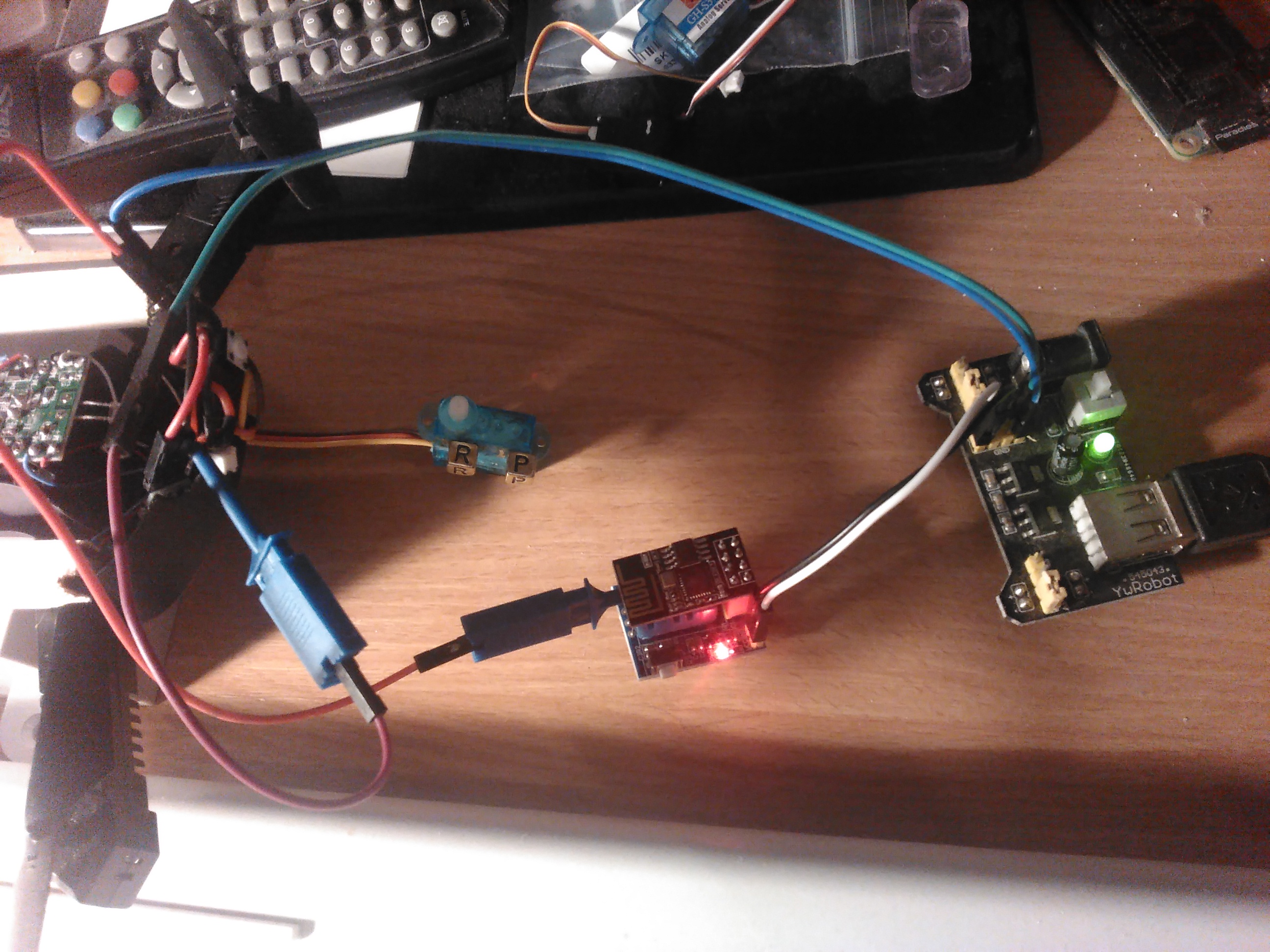
Next I removed the ESP01s from the connectors superglued to drone back and did connect 5V, GND and signal to the drone SG37 servo. Connection to 5V on step-down converter in drone and GPIO0 of ESP01s in DHT11 module was done easily with logic analyzer hook clips. Unfortunately this test confirms that the servo is broken:
I will have to cut the 3 cables superglued to drone somewhere, and connect the new servo. Most importantly I will have to avoid the same issue, as the last animations proved the servo worked fine BEFORE it was superglued to drone. Mayby some superglue got inside the servo -- I once lost a DC motor as I superglued a wheel on its shaft and was not careful enough to avoid superglue getting into the motor [after I realized it, I immediately connected 12V to the motor to get it rotating at maximal speed, but superglue won as motor got slower and slower until stopping completely ].
].
P.S:
The reason I did not try the SG17 (1.7g) servo seen in 1st photo is that I cannot find a datasheet. From SG37 information provided by the suppliers I know its input voltage range is 4.8-6.0V. For the SG17 I only know that its "low voltage" servo, and that 3.7V and 4.2V are valid inputs, but no information on valid input voltage range.
Today I first tested the spare SG37 3.7g servo motor I have, 3.3V and 5V voltages from MB102 power supply module, another ESP01s plugged into ESP01 DHT11 module for using its 2x4 connector. The new servo worked as expected:
Next I removed the ESP01s from the connectors superglued to drone back and did connect 5V, GND and signal to the drone SG37 servo. Connection to 5V on step-down converter in drone and GPIO0 of ESP01s in DHT11 module was done easily with logic analyzer hook clips. Unfortunately this test confirms that the servo is broken:
I will have to cut the 3 cables superglued to drone somewhere, and connect the new servo. Most importantly I will have to avoid the same issue, as the last animations proved the servo worked fine BEFORE it was superglued to drone. Mayby some superglue got inside the servo -- I once lost a DC motor as I superglued a wheel on its shaft and was not careful enough to avoid superglue getting into the motor [after I realized it, I immediately connected 12V to the motor to get it rotating at maximal speed, but superglue won as motor got slower and slower until stopping completely
P.S:
The reason I did not try the SG17 (1.7g) servo seen in 1st photo is that I cannot find a datasheet. From SG37 information provided by the suppliers I know its input voltage range is 4.8-6.0V. For the SG17 I only know that its "low voltage" servo, and that 3.7V and 4.2V are valid inputs, but no information on valid input voltage range.